When I first heard about these little 2.5″ quads I questioned the need for them. I really didn’t understand if they were hype or not. So I built a “HoneyPot” from AirBladeUAV. The HoneyPot was supposed to be the big brother of the TinyWhoop. It sounded great on paper, but mine never flew right. It was a constant battle of gremlins. The screws were hitting the motors, the ESC’s were not happy, motors were not happy, random flips, poor performance and the list just continued.
So obviously when AirBladeUAV released the Creampuff I was even more hesitant. I was told the HoneyPot was just too heavy and the Creampuff would be better. I questioned how much difference could 20g make? Turns out it was a lot! This little Creampuff screams! I actually re-used nearly all the components from the HoneyPot so the build was a breeze. I was able to diagnose one of the ESC’s was bad. It was good enough to hover but any punch out would cause a death spin into the ground.
I also swapped out the FuriousFPV RX for a FrSky XM. A little disappointed by the XM to be honest. The first real flight with the Creampuff showed me the XM just doesn’t have the distance I would have expected. I was sitting on my porch and as soon as I got over the top of the house I lost signal, it came crashing down about 20 feet into the roof, then bounced onto the side yard. No damage thankfully. Since then I just don’t go very far away with it. I also do not have any telemetry info at all, but I have found that I am easily getting 3-4 minutes of flight on a 3S 450mah battery.
Quad Details:
AUW Weight: 107.65
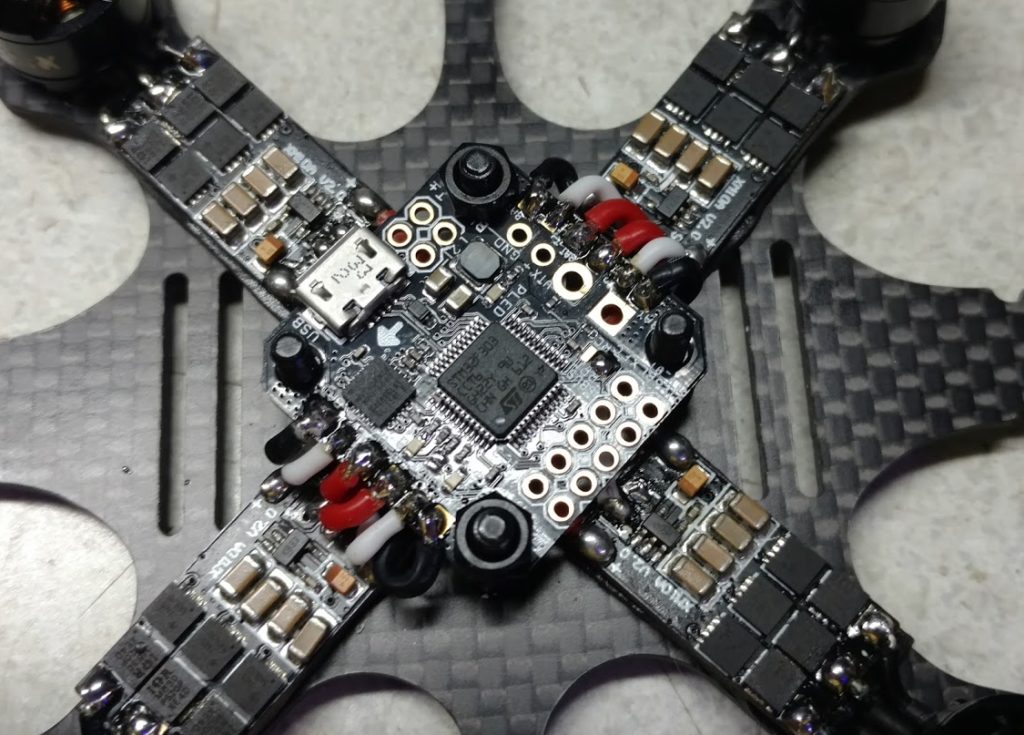
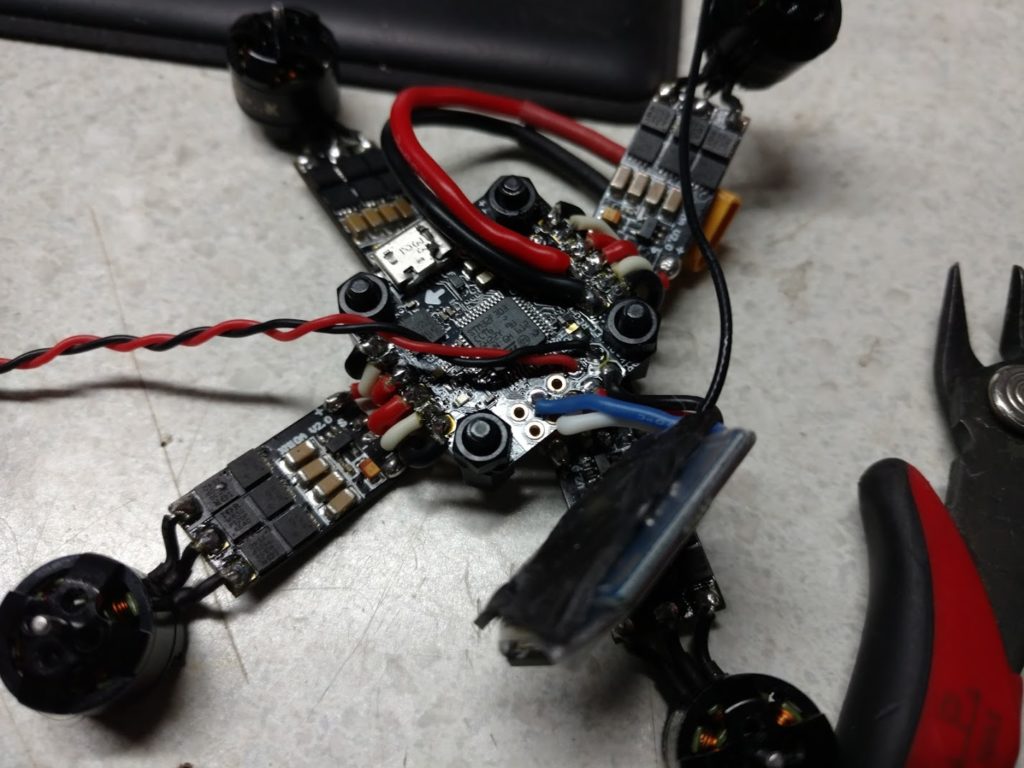
Frame: AirBladeUAV Creampuff
Flight Controller: FuriousFPV PIKO BLX
Firmware: Betaflight 3.1.5
CLI: Nearly stock PID’s, D was increased slightly (4-5)
Motors: RotorX 1105B 6500kV
Props: RotorX RX2535
ESC’s: DYS XM10
Cam/VTX: Eachine TX03
Receiver: FrSky XM
Battery: Tattu 450mah 3S 75c